That picture is from an unadulterated part of the cable which from the surface looked almost perfect but still had some unusual feel or look. If it's close enough to whichever end you would just cut it out and live with a somewhat shortened cable. On the 9000 series polaris most of the time it's an internal brake just outside of where it exits the shell there's a short rigid black 90° swivel. Lot of work but saved a few and lost 24" out of its total length.Wow! Nice picture. And good advice!!
Yeah, I’ll pull the cable and see what it looks like. I have a DVM and a separate continuity tracer. I suspect the cable is the most likely source. I had noticed this last season that it had gotten really twisted up at times so I wonder if there may be cracks in the underlying wiring.

So this just happened....
- Thread starter JoyfulNoise
- Start date
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Matt,
If we are guessing the problem, my guess is that the bearings or gears that move the tracks are worn out. This means it takes more current to drive the robot around. It works upside down because there is no weight on the tracks and it is not underwater. Once in the water, there is just too much drag and the current sensor sees more current than the limit, and it fails the self-test.
Thanks,
Jim R.
If we are guessing the problem, my guess is that the bearings or gears that move the tracks are worn out. This means it takes more current to drive the robot around. It works upside down because there is no weight on the tracks and it is not underwater. Once in the water, there is just too much drag and the current sensor sees more current than the limit, and it fails the self-test.
Thanks,
Jim R.

- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Matt,
If we are guessing the problem, my guess is that the bearings or gears that move the tracks are worn out. This means it takes more current to drive the robot around. It works upside down because there is no weight on the tracks and it is not underwater. Once in the water, there is just too much drag and the current sensor sees more current than the limit, and it fails the self-test.
Thanks,
Jim R.
Well, something I’ll have to look at once I get it disassembled.
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
So I'm leaning against the cable/motor theory ....
Here's what I've done ... I started by completely cleaning up my work bench in the garage so I could disassemble it near all my tools ... YAY for cleaning up the garage shop, it really needed it. Then I took a long beer break ......
{whistles a lot while drinking a brew ...}
OK. SO then I removed the motor from the robot and decided to bench test it. The drive motor and water pump impeller both move freely and easily. No binding or grinding. Plugged the cable into the power supply and ran the motor on the bench. Everything spins up just fine and it passes through it's self-test cycles. Shut down the motor after a few minutes because you're really not supposed to run them out of the water for too long. While it was run I wiggles and bent the cable every which way to Sunday and at both connector ends. Motor never got interrupted. So I'm thinking all the connections are just fine and the motor is good enough at least on the bench.
So that led me to the wheels, brushes and treads ... and here is where I think the issue lies. Hard to explain verbally and I failed to take any pictures or video so you're going to have to put down the hot dog and beer, put on your imagination hat and really focus on what I'm trying to describe ... hopefully you haven't had too many beers ... or maybe it would be good if you did .... up to you.
When I manually turn the wheels/brushes and move the treads, they move freely for a length and then they start to bind up. If you watch the tread roll over their wheels (they have a gear and tooth design so that the treads are locked into the wheel) you will see the teeth on the inside of the tread pop up out of the gear teeth as if there is too much slack. This causes the wheels and brushes to bind up a bit until you force it to go further and then the treads fall back into place. It happens about twice during a full rotation of the main wheel. So, further disassembly revealed what I think is the issue -

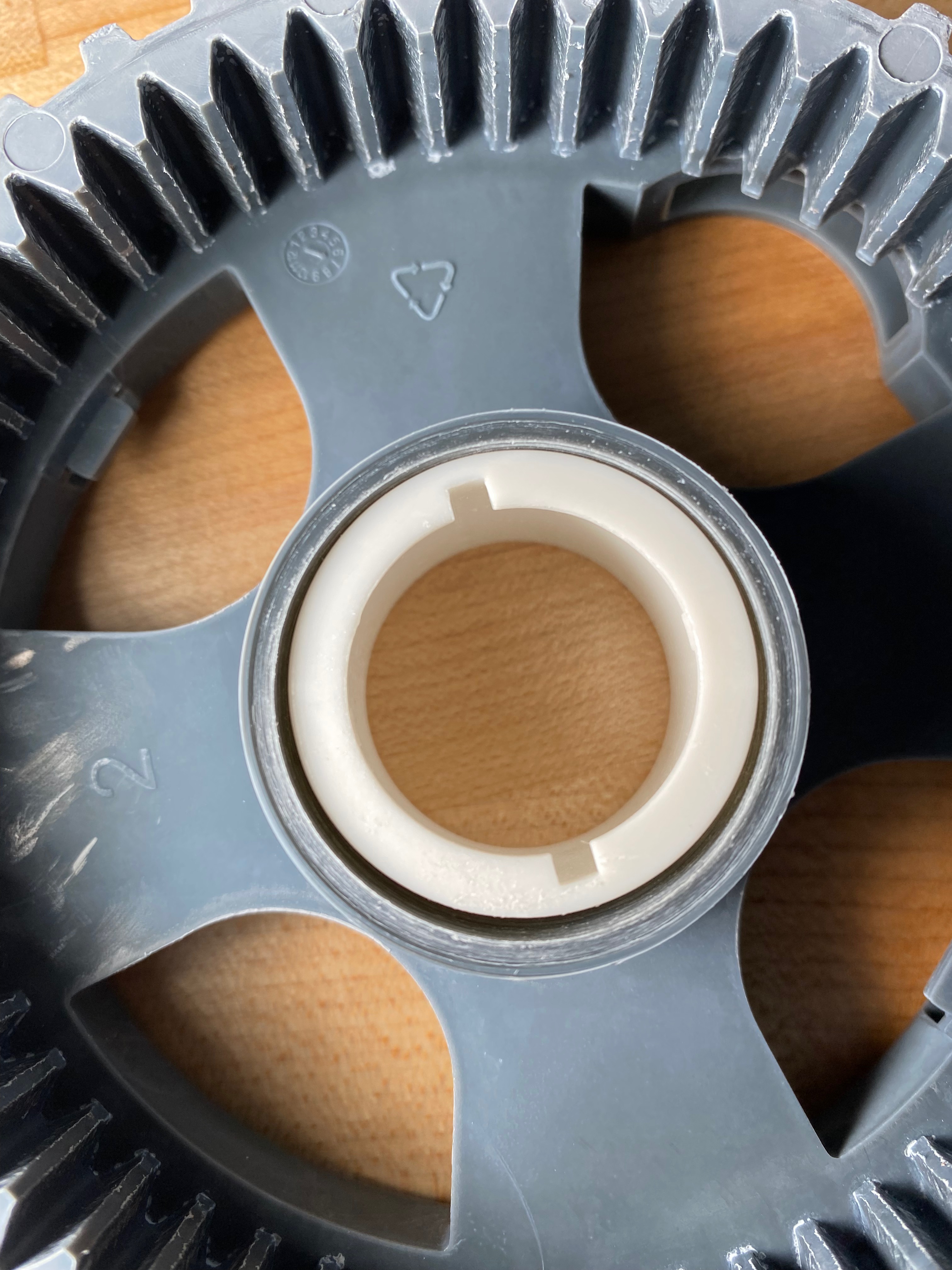
Notice that gap between the front wheel and it's bushing (I don't think it's teflon, feels like nylon). So as the wheel rotates when the motor drives it, it's not a pure rotation but rather a rotation about an axis that is not coincident with the shaft on the robot body. The wheel essentially moves forward and backwards while rotating and it's enough to cause the tread to pop up out of its channels and bind.
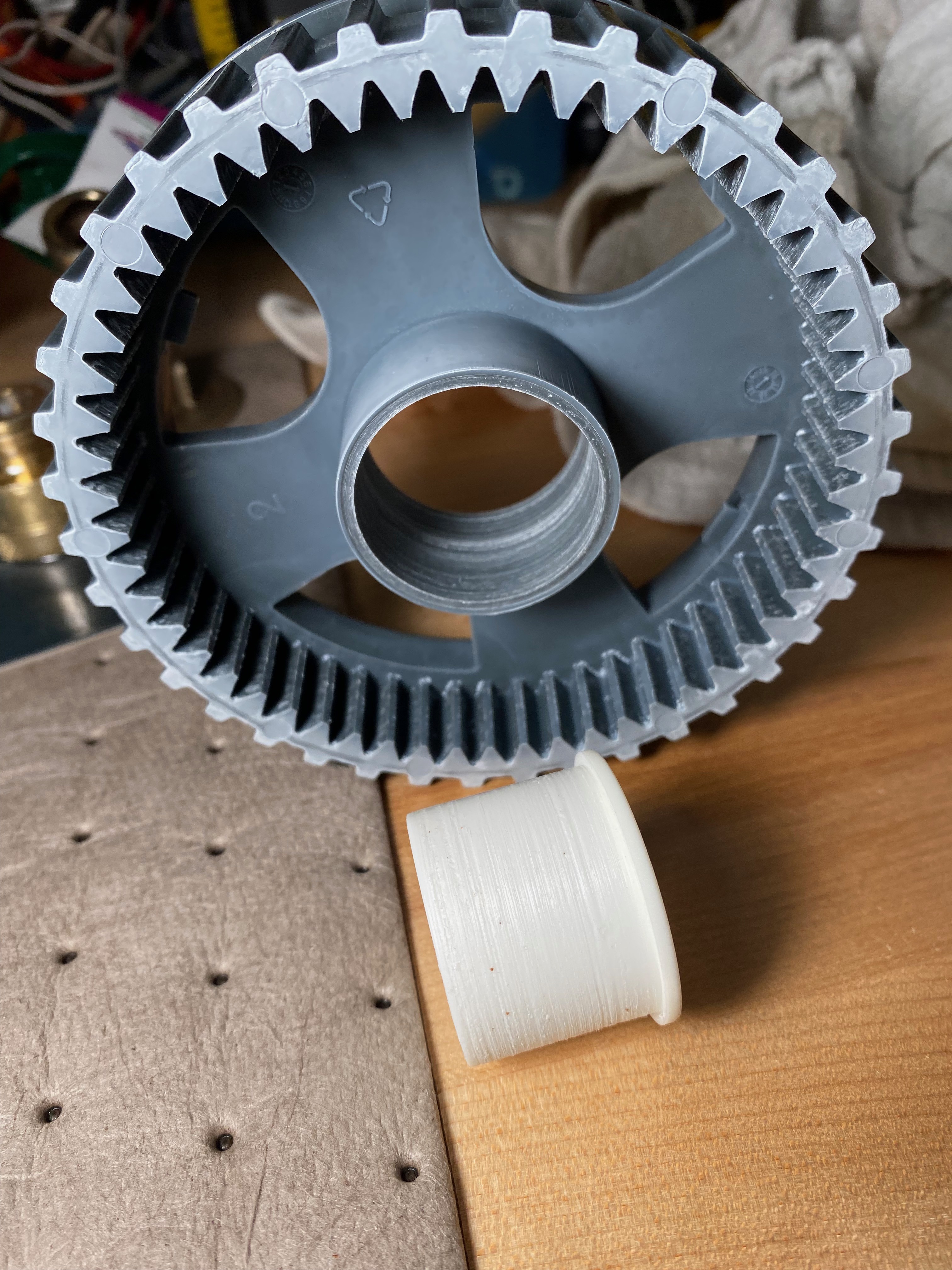
The fix would be to get new wheels and bushings ... probably $40 worth of parts. The problem - Marina doesn't have them and I'm not seeing them ANYWHERE on the inter-webz. The part is - Maytronics Dolphin 9993219 Wheel Kit
Also you can see how worn out the interior surface of the wheel is and the exterior surface of the bushing it rides on. Definitely falls under "wear & tear" ....
Here's what I've done ... I started by completely cleaning up my work bench in the garage so I could disassemble it near all my tools ... YAY for cleaning up the garage shop, it really needed it. Then I took a long beer break ......
{whistles a lot while drinking a brew ...}
OK. SO then I removed the motor from the robot and decided to bench test it. The drive motor and water pump impeller both move freely and easily. No binding or grinding. Plugged the cable into the power supply and ran the motor on the bench. Everything spins up just fine and it passes through it's self-test cycles. Shut down the motor after a few minutes because you're really not supposed to run them out of the water for too long. While it was run I wiggles and bent the cable every which way to Sunday and at both connector ends. Motor never got interrupted. So I'm thinking all the connections are just fine and the motor is good enough at least on the bench.
So that led me to the wheels, brushes and treads ... and here is where I think the issue lies. Hard to explain verbally and I failed to take any pictures or video so you're going to have to put down the hot dog and beer, put on your imagination hat and really focus on what I'm trying to describe ... hopefully you haven't had too many beers ... or maybe it would be good if you did .... up to you.
When I manually turn the wheels/brushes and move the treads, they move freely for a length and then they start to bind up. If you watch the tread roll over their wheels (they have a gear and tooth design so that the treads are locked into the wheel) you will see the teeth on the inside of the tread pop up out of the gear teeth as if there is too much slack. This causes the wheels and brushes to bind up a bit until you force it to go further and then the treads fall back into place. It happens about twice during a full rotation of the main wheel. So, further disassembly revealed what I think is the issue -
Notice that gap between the front wheel and it's bushing (I don't think it's teflon, feels like nylon). So as the wheel rotates when the motor drives it, it's not a pure rotation but rather a rotation about an axis that is not coincident with the shaft on the robot body. The wheel essentially moves forward and backwards while rotating and it's enough to cause the tread to pop up out of its channels and bind.
The fix would be to get new wheels and bushings ... probably $40 worth of parts. The problem - Marina doesn't have them and I'm not seeing them ANYWHERE on the inter-webz. The part is - Maytronics Dolphin 9993219 Wheel Kit
Also you can see how worn out the interior surface of the wheel is and the exterior surface of the bushing it rides on. Definitely falls under "wear & tear" ....
Matt,
I've done a few Polaris 9000 series complete rebuild and changed out every gear and bushing. When done you have a brand new beast. They design them so only cheaper plastics/nylons get changed while the more expensive parts for the most part stay unaffected.
I've done a few Polaris 9000 series complete rebuild and changed out every gear and bushing. When done you have a brand new beast. They design them so only cheaper plastics/nylons get changed while the more expensive parts for the most part stay unaffected.
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Matt,
I've done a few Polaris 9000 series complete rebuild and changed out every gear and bushing. When done you have a brand new beast. They design them so only cheaper plastics/nylons get changed while the more expensive parts for the most part stay unaffected.
Yeah. If I can find the parts then I’ll replace all the wheels and bushings. I changed the treads and brushes last year. I have to say, the treads are well worn after just one season. My pool surface (pebbletec) must really chew them up.
Turbo1Ton
Gold Supporter
- Dec 26, 2019
- 1,995
- Pool Size
- 14500
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-40
Know anyone with a 3D printer with nylon filament?
Those look like they would be an easy print. - The bushings that is.
--Jeff
Those look like they would be an easy print. - The bushings that is.
--Jeff
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Matt,
Can you shim it somehow to take out the slack?
Jim R.
I'll have to think about how that might be done and not last all of one cleaning cycle. The wheel and bushing are both worn so there may be no way to take all the slack out of it and get both wheels aligned on the same axis of rotation. Essentially the wheels would be locked into some off position and then they would "walk" instead of rotate.
Know anyone with a 3D printer with nylon filament?
Those look like they would be an easy print. - The bushings that is.
--Jeff
No one close enough to me to care. As I said to @Jimrahbe , the wheel and bushing are mated together with a pretty tight tolerance so even if you could print a new bushing, the deformed wheel channel would still be problematic.
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Funny, just found this thread by @djw - Drive Wheel Bearings Maytronics/Dolphin S200?
Ordered wheels and bushings from the links there ... hope they arrive soonish and it fixes my issues. $22 in parts
Ordered wheels and bushings from the links there ... hope they arrive soonish and it fixes my issues. $22 in parts
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Well …. Maybe I’ll get it in time for Valentine’s Day ? Email from Poolweb -
Ugh, the supply chain crisis is real and spectacular
I’ll call around to some local shops to see if anyone had parts in their stores. There’s at least two stores I can call. If not, looks like I’ll be manually vacuuming the pool for a while.
Currently, we expect your order to ship out of our warehouse on or around 02/03/2022. This is an estimated shipment date which could vary, but we will keep you informed if we receive any additional information regarding this order.
Ugh, the supply chain crisis is real and spectacular
I’ll call around to some local shops to see if anyone had parts in their stores. There’s at least two stores I can call. If not, looks like I’ll be manually vacuuming the pool for a while.
- Jun 1, 2018
- 16,019
- Pool Size
- 26000
- Surface
- Vinyl
- Chlorine
- Salt Water Generator
- SWG Type
- Hayward Aqua Rite (T-15)
Hey - at least it wasn’t an out of stock dear John email !Well …. Maybe I’ll get it in time for Valentine’s Day ? Email from Poolweb -
Ugh, the supply chain crisis is real and spectacular
I’ll call around to some local shops to see if anyone had parts in their stores. There’s at least two stores I can call. If not, looks like I’ll be manually vacuuming the pool for a while.
You’ll have to settle for chocolates for valentines …
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Hey - at least it wasn’t an out of stock dear John email !
You’ll have to settle for chocolates for valentines …
I do not like chocolate. Prefer plastic wheels and bushings instead

- Jun 1, 2018
- 16,019
- Pool Size
- 26000
- Surface
- Vinyl
- Chlorine
- Salt Water Generator
- SWG Type
- Hayward Aqua Rite (T-15)
Awe 
 really is a special bond.
really is a special bond.
If it makes u feel any better I just checked the status of a replacement boot order placed the day after Christmas (Santa’s gift didn’t fit) & they’re scheduled to arrive on Feb 20th at the earliest - hasn’t even shipped yet
I just keep reminding myself it’s better than the Sears catalog days so I had better be grateful.
Hopefully your bot will be poppin wheelies by then!
really is a special bond. If it makes u feel any better I just checked the status of a replacement boot order placed the day after Christmas (Santa’s gift didn’t fit) & they’re scheduled to arrive on Feb 20th at the earliest - hasn’t even shipped yet
I just keep reminding myself it’s better than the Sears catalog days so I had better be grateful.
Hopefully your bot will be poppin wheelies by then!
I had the joy of ordering two wheel cylinders for my son's car. Finally got them yesterday. One of them was filthy and obviously used. It was also leaking a black oily fluid. Sent them both back today.
- Jun 1, 2018
- 16,019
- Pool Size
- 26000
- Surface
- Vinyl
- Chlorine
- Salt Water Generator
- SWG Type
- Hayward Aqua Rite (T-15)
Have u tried rock auto? We get tons of parts from there - lots of toyota oem stuff & good customer service if there’s an issue.I had the joy of ordering two wheel cylinders for my son's car. Finally got them yesterday. One of them was filthy and obviously used. It was also leaking a black oily fluid. Sent them both back today.
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Did you see any of those stories about the train robberies happening in LA? Apparently thieves wait for the cargo trains to get stopped up in this area of LA (doe to rail congestion) and then they jump in and pry open shipping container and UPS containers. Then they raid all the packages inside. No one stops them. It’s crazy. They go for the UPS containers because those are most likely to contain Amazon and other retail packages. The images of the rail lines littered with ripped open boxes is amazing.
Found it -

 losangeles.cbslocal.com
losangeles.cbslocal.com
Found it -
Thieves Raiding Cargo Containers, Stealing Packages On Downtown Section Of Union Pacific Train Tracks
The area is littered with thousands of shredded boxes and items, from retailers like Amazon and REI, that robbers left behind, despite Union Pacific's patrols and numerous efforts to clean up the tracks over the last several months.
- Jun 1, 2018
- 16,019
- Pool Size
- 26000
- Surface
- Vinyl
- Chlorine
- Salt Water Generator
- SWG Type
- Hayward Aqua Rite (T-15)
That’s terrible!Did you see any of those stories about the train robberies happening in LA? Apparently thieves wait for the cargo trains to get stopped up in this area of LA (doe to rail congestion) and then they jump in and pry open shipping container and UPS containers. Then they raid all the packages inside. No one stops them. It’s crazy. They go for the UPS containers because those are most likely to contain Amazon and other retail packages. The images of the rail lines littered with ripped open boxes is amazing.
Katodude
Silver Supporter
- Aug 22, 2017
- 3,003
- Pool Size
- 15000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Hayward Aqua Rite (T-15)
I do not like chocolate.
Wait, wait, wait, wait. How did everyone manage to let this little nugget go? Who does not like chocolate? Your wife was right, you really do have issues.
- May 23, 2015
- 25,705
- Pool Size
- 16000
- Surface
- Plaster
- Chlorine
- Salt Water Generator
- SWG Type
- Pentair Intellichlor IC-60
Wait, wait, wait, wait. How did everyone manage to let this little nugget go? Who does not like chocolate? Your wife was right, you really do have issues.
It is true. I have never really liked chocolate my entire life. I’d rather eat an apple than a slice of chocolate cake.
But, interestingly enough, I do love coffee. Even as a little kid I would order coffee flavored ice cream. And you know what else is interesting …. the active compound in chocolate, theobromine, and caffeine differ only by a single methyl group.

Chocolate Vs. Coffee (Theobromine Vs. Caffeine)
Oftentimes, we find ourselves in need of that early morning or afternoon-stretch “pick me up”. For many, they grab a cup of coffee, for others, the caffeine is overwhelming or inconvenient. Despite this, one still desires the energy hike of caffeine without its lingering affects and...
Thread Status
Hello , This thread has been inactive for over 60 days. New postings here are unlikely to be seen or responded to by other members. For better visibility, consider Starting A New Thread.
Similar threads
- Replies
- 7
- Views
- 316
- Replies
- 1
- Views
- 63
- Replies
- 6
- Views
- 1K